Para su hada artificial, Hao Zeng y Jianfeng Yang se inspiraron en las semillas de diente de león. - JIANFENG YANG / TAMPERE UNIVERSITY
MADRID, 30 Ene. (EUROPA PRESS) -
Investigadores de la Universidad de Tampere han desarrollado el primer robot volador pasivo dotado de músculo artificial, con la idea final de utilizarlo en el futuro para la polinización artificial.
La pérdida de polinizadores, como las abejas, es un enorme reto para la biodiversidad mundial y afecta a la humanidad al causar problemas en la producción de alimentos.
El desarrollo de polímeros que responden a estímulos ha abierto un abanico de posibilidades en cuanto a materiales para la próxima generación de robots de cuerpo blando a pequeña escala y controlados de forma inalámbrica. Desde hace algún tiempo, los ingenieros saben cómo utilizar estos materiales para fabricar pequeños robots capaces de caminar, nadar y saltar. Hasta ahora, nadie había sido capaz de hacerlos volar.
Los investigadores del grupo de Robots Ligeros de la Universidad de Tampere investigan ahora cómo hacer volar materiales inteligentes. Hao Zeng, investigador de la Academia y jefe del grupo, y Jianfeng Yang, investigador doctoral, han ideado un nuevo diseño para su proyecto llamado FAIRY (Flying Aero-robots based on Light Responsive Materials Assembly). Han desarrollado un robot de ensamblaje de polímeros que vuela con el viento y se controla con la luz.
"Superior a sus homólogos naturales, esta 'semilla' artificial está equipada con un actuador blando. El actuador está hecho de elastómero cristalino líquido sensible a la luz, que induce acciones de apertura o cierre de las cerdas ante la excitación de la luz visible", explica Hao Zeng en un comunicado.
El hada artificial desarrollada por Zeng y Yang tiene varias características biomiméticas. Gracias a su estructura de gran porosidad (0,95) y poco peso (1,2 mg), puede flotar fácilmente en el aire dirigida por el viento. Además, la generación de un anillo de vórtices separados y estables permite desplazamientos a larga distancia asistidos por el viento.
"El 'hada' puede ser alimentada y controlada por una fuente de luz, como un rayo láser o un LED", afirma Zeng.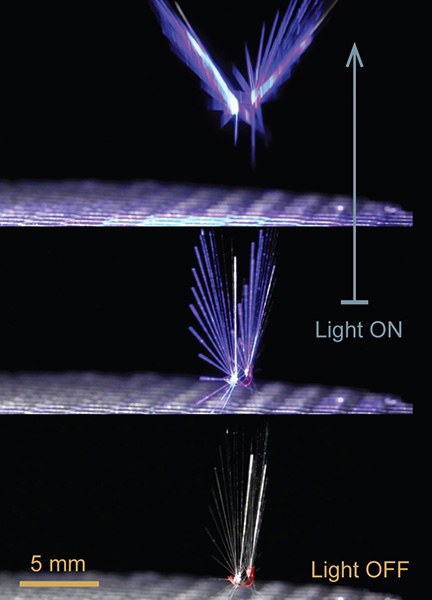
Esto significa que se puede utilizar la luz para cambiar la forma de la diminuta estructura parecida a una semilla de diente de león. El hada puede adaptarse manualmente a la dirección y la fuerza del viento cambiando su forma. También se puede utilizar un haz de luz para controlar las acciones de despegue y aterrizaje de este conjunto polimérico.
A continuación, los investigadores se centrarán en mejorar la sensibilidad del material para permitir el funcionamiento del dispositivo a la luz del sol. Además, ampliarán la estructura para que pueda transportar dispositivos microelectrónicos como GPS y sensores, así como compuestos bioquímicos.
POLINIZACIÓN ARTIFICIAL
Según Zeng, hay potencial para aplicaciones aún más significativas. "Suena a ciencia ficción, pero los experimentos de prueba de concepto incluidos en nuestra investigación demuestran que el robot que hemos desarrollado supone un paso importante hacia aplicaciones realistas adecuadas para la polinización artificial", revela.
En el futuro, millones de semillas artificiales de diente de león portadoras de polen podrían ser dispersadas libremente por los vientos naturales y luego dirigidas por la luz hacia zonas específicas con árboles en espera de polinización.
"Esto tendría un enorme impacto en la agricultura mundial, ya que la pérdida de polinizadores debida al calentamiento global se ha convertido en una grave amenaza para la biodiversidad y la producción de alimentos", afirma Zeng.
Sin embargo, antes hay que resolver muchos problemas. Por ejemplo, ¿cómo controlar el punto de aterrizaje de forma precisa? ¿Cómo reutilizar los dispositivos y hacerlos biodegradables? Estas cuestiones requieren una estrecha colaboración con científicos de materiales y personas que trabajen en microrobótica.
El proyecto FAIRY comenzó en septiembre de 2021 y durará hasta agosto de 2026. Está financiado por la Academia de Finlandia. El robot volador se investiga en colaboración con el Dr. Wenqi Hu, del Instituto Max Planck de Sistemas Inteligentes (Alemania), y el Dr. Hang Zhang, de la Universidad Aalto.
 Andalucía
Andalucía
 Aragón
Aragón
 Cantabria
Cantabria
 Castilla-La Mancha
Castilla-La Mancha
 Castilla y León
Castilla y León
 Catalunya
Catalunya
 Extremadura
Extremadura
 Galicia
Galicia
 Islas Canarias
Islas Canarias
 Islas Baleares
Islas Baleares
 Madrid
Madrid
 País Vasco
País Vasco
 La Rioja
La Rioja
 C. Valenciana
C. Valenciana
 Navarra
Navarra
 Asturias
Asturias
 Murcia
Murcia
 Ceuta y Melilla
Ceuta y Melilla
